













本系統的最大特點在於利用I2C傳輸介面串接各個模組,因此可依需求變更模組種類,系統會自動判斷模組的狀態,使應用更具彈性。此外,本系統還以工業型電腦(IPC)開發出人性化且操作簡易的人機介面,車上各項訊息能夠一目了然,一旦有狀況發生時,系統會以燈號及中文語音告知車上的人,使系統更為完整。
MCU讓每個模組皆能獨立運作
本系統中所有的模組均是以盛群單晶片(HT46R24)微控制器開發而成,這些模組包含伺服馬達控制器、超音波模組、反射型紅外線模組、電子羅盤、氣體感測器、火焰感測器、人體紅外線模組及電池電流電壓感測模組等。由於每個模組上均有微處理器,因此每個模組皆可獨立運作。在系統中利用I2C介面作為各模組的通訊匯流排,此系統設計概念是希望讓每個模組能自由依照需求被更換,利用個人電腦(PC)作為人機介面,因此需要一個主控端處理各模組的通訊與人機介面的溝通,選用了盛群單晶片(HT46RU25)作為I2C的Master及與PC的溝通任務。由於盛群的I2C為Slave Mode,I2C Master利用軟體方式運作,並運用HT46RU25上的通用非同步收發器(UART)來與PC連接(圖1)。
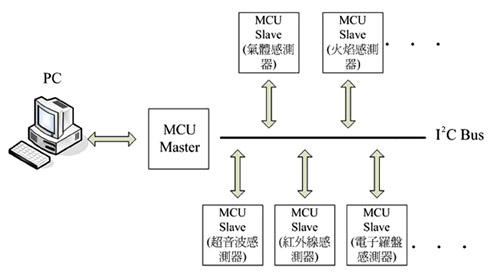 |
| 圖1 智慧型汽車架構圖 |
在系統中,由於每個模組的特性及功能不同,因此每個模組的資料傳輸長度也會不一樣,而為了能夠達到「隨插即用」的功能,設計了一個通訊協定,除了將每個模組的通訊方式統一外,也能夠達到隨插即用的需求。圖2中,每個模組均需要設定位置,也就是每個模組的ID,透過ID的判斷,讓系統能夠知道目前系統中有哪幾個模組已經連接,並透過通訊協定來處理相對應模組的資料。
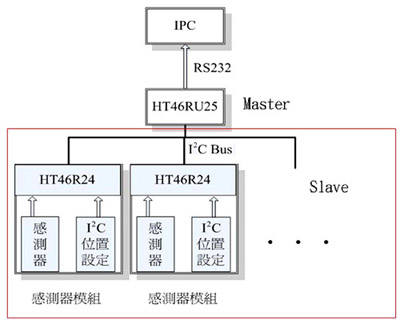 |
| 圖2 智慧型汽車方塊圖 |
而各模組的通訊協定基本上包含以下幾個部分:
| 用來作為資料傳輸的起始判斷,在此固定使用16進制的35H。 |
| 宣告此資料封包是由哪個模組傳出或控制端將傳出資料給哪個模組。 |
| 宣告此資料封包的實際資料長度有多少位元組。 |
| 透過此位元組可以傳遞資料以外的各項模組狀態,或是通訊方向等資訊。 |
| 此區為變動長度,視模組不同而變更,此區即為模組傳出或系統傳給模組的實際資料。 |
| 此位元組是將包含起始位元整個封包的資料,以xor方式計算後,取最後的1位元組,作為確認資料在傳遞過程中,並無任何錯誤檢查用,以確保資料傳輸正常。 |
系統中每個模組透過通訊協定,將資料傳至Master端,或是由Master端接收來自於PC的控制資料,因此每個模組也可依照系統的需求,改變模組上的設定,例如警戒值的設定等,讓系統對各個模組的控制與使用更為完整。
另外,Master模組會檢查目前系統中有多少個模組接入,或是有哪個模組已經移出,確認後,Master端即會向目前在線的模組要求資料,並將所有在線模組資料接收完成後,組合成一個包含所有在線模組資料的大型封包,傳遞到PC端作人機介面處理,基本上Master要傳遞給PC的資料封包,不同的地方在於Master封包的起始位元改為16進制的A0H,緊接著起始位元後的資料為目前系統上有多少個模組數量,之後即為通訊協定中的各模組資料。透過I2C的實體連接方式,再利用一個標準的通訊協定,建構成為智慧型汽車系統。
此系統設計目標為以電池為能源並以馬達驅動的智慧型汽車系統,大致上可分為車體內部、避障安全、導航系統、伺服馬達驅動及電池等各層(圖3),以下詳細介紹各層模組與其功能。
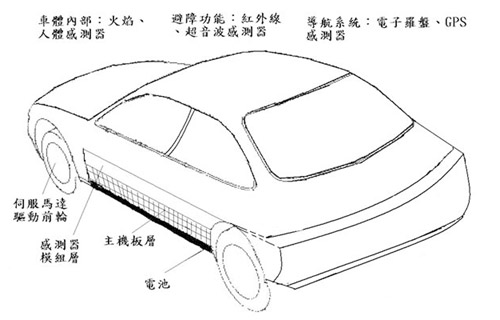 |
| 圖3 智慧型汽車各部構想 |
馬達驅動/電力監控為系統動力核心
馬達驅動與電力監控為整個汽車系統的動力控制與動力監控核心,主要分為直流伺服馬達驅動與電池之電流電壓監控兩個模組。在馬達驅動部分採用的是直流伺服馬達,並且馬達上有Encoder的回授訊號,因此開發了一個馬達驅動模組以控制直流伺服馬達。由於汽車上有兩顆馬達,在模組上也用了兩顆HT46R24分別控制兩顆馬達,由於這兩顆微處理機須控制馬達且處理馬達上Encoder回授的訊號,因此馬達驅動的脈衝寬度調變(PWM)訊號就由另一個HT46R24處理,而這顆微處理機也同時負責傳送與接收Master端的訊號,使馬達能夠接受人機介面的控制與回傳馬達控制模組的狀態。
此模組對馬達的控制有兩種模式,一種是「速度模式」,即以PWM來控制兩顆馬達到等速,此速度由人機介面控制,並由馬達控制模組中的主控微處理機產生PWM訊號後,再透過兩顆馬達控制的微處理機執行實際的速度控制。第二種控制模式為「步階模式」,即由人機介面端發出馬達轉動多少個Step數,而此Step數則為Encoder回傳的數字,因此若以一般直流伺服馬達Encoder的解析度而言,其步階精密度可以達到每圈一千步,此種模式即適用於精密控制(如倒車、S型等)的狀況使用。而在馬達的功率控制方面,由於馬達動作需要較大電流,因此採用VNH3SP30作為馬達的驅動。
由於智慧型汽車系統的動力來源是電池,電池的電壓及電流值即相當重要,因為電池的供電不穩或是過電流使用,都會造成系統無法正常運作;而任何的系統不穩定,都可能對人造成威脅,因此開發了一個能夠隔離錯誤訊號,以確保訊號正確的電力偵測模組。此模組使用HT46R24,而對於電壓及電流的偵測,各採用了四個電流感測器,並且在微處理機中使用冗長資料管理方法(Redundant Management Method)的演算法,透過此一演算法可以隔離錯誤的感測器資料與隔離故障的感測器,使模組能夠得到正確的感測值,以提供系統作決策。
由於感測器的訊號較小,為了避免電池在運作中的電壓、電流改變影響到感測電路,此模組中盡量使用精密元件,並且透過電路設計,避免因電池在工作中的電壓、電流變化影響模組的正確性,因此在模組上即設計訊號放大電路、訊號校正電路及穩壓電路,透過這些電路,使模組與感測器都能在電池變動的環境下正常的運作。
超音波/反射型紅外線感測器/加速規模組提升車輛安全性
在本智慧型汽車的設計中,為了確保乘客的安全,設計了安全偵測系統,偵測行駛或靜止狀態下是否會有物體對車輛及乘客造成危害。在此使用的是超音波及反射型紅外線兩種感測器,而這兩種感測器在車體上的配置如圖4,在圖中超音波與紅外線的位置是相同的。採用這兩種感測器的原因在於,反射型紅外線的偵測範圍為0~60公分,而超音波感測器的感測範圍是40~1,000公分,能夠予以互補。透過這樣的設計,當有物體接近車體時,系統即會警告乘客注意,由於車體兩側的感測器配置在車門上,因此當乘客打開車門時,如有物體接近,系統也會警告乘客小心。利用HT46R24加上超音波與反射型紅外線開發而成的安全偵測模組,來偵測車輛的環境,當有物體接近車輛時系統即會以中文語音告知使用者注意,進而提升車輛與乘客的安全性。
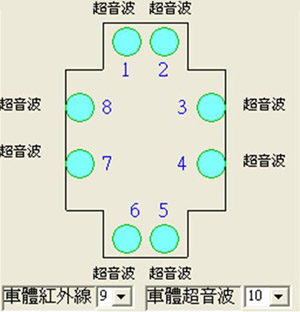 |
| 圖4 超音波與反射型紅外線配置圖 |
除了上述的超音波/反射型紅外線模組,另外也以HT46R24開發了加速規模組。當車輛高速行駛時,車體的傾斜度會影響到安全,因此設計了一個兩軸的加速規模組,偵測車輛的姿態,確保車輛在行進間不會因為速度快、傾斜角過大而產生危險,以及偵測是否發生碰撞。此模組中可透過一個X-Y兩軸的加速規感測器的回傳資料,計算出傾斜角。
環境偵測/行駛輔佐系統結合語音功能確保乘客安全
環境偵測模組主要是針對車輛內部的環境狀況進行偵測,提供乘客有舒適的車內環境,另外還包含了火焰感測以偵測引擎室、車內及行李箱是否有火苗產生,確保乘客安全,最後加上人體紅外線模組作為防盜之用,當有人入侵時,系統會以中文語音發出入侵警報,提供車主處理。在環境偵測模組中,以HT46R24開發了一個溫度、濕度、照度三合一的感測模組,透過此三合一模組來偵測車廂內的環境,並以語音的方式告知乘客目前車內的狀況。
另外,為了防止車內有任何火苗出現,而造成火災,也以HT46R24開發出一個火焰感測模組,在這個模組中,使用的是紫外線光電管型的火焰感測器,主因在於此種感測器的靈敏度高,利用此種感測器設計一個同時具有三個感測器的火焰感測模組,並將三個感測器分別安裝於引擎室、車廂及行李箱中。
為了讓駕駛者能夠隨時掌握車輛的行駛方向,利用HT46R24與電子羅盤開發出電子羅盤模組,以隨時提供目前車輛方向,讓駕駛參考。在上述分別介紹智慧型汽車的各部硬體模組後,最後將這些模組整合起來成為一部智慧型汽車系統。本系統的人機介面(圖5),在此系統中盡量以清晰明瞭的方式將所有模組的資訊整合在一個畫面上,並為了防止畫面過於繁複,也多半以圖示的方式來表示,並且透過中文語音模組,以語音方式說出每個模組的狀態及發生狀況時的提示,操作者並能夠針對警示內容與時間加以設定,透過此一人機介面與硬體系統的整合,開發出能真正量產並使用的智慧型汽車系統。
 |
| 圖5 智慧型汽車系統人機介面 |
利用單晶片HT46R24開發出智慧型汽車的各項模組,並利用HT46RU25作為整個系統的Master,透過I2C介面串接各個模組,最後再利用PC作為主控端,形成一個完整的智慧型汽車系統,要求各模組的穩定性與安全性,以能夠實際量產與商品化為其最終目標。
(本文作者郭智宏、王基旭就讀於雲林科技大學電機工程系、蘇國嵐為該系助理教授)